



联系我们
Contact us
森科云创科技(深圳)有限公司
Senke Innovations Technology Co., Ltd
TEL:0755-8338 2595
Phone: 181 1872 7722(微信同号)
Email:info@senkei.com.cn
地址:深圳市龙岗区龙岗大道8288号大运软件小镇27栋203-204
六轴机器人的Composer动画
六轴关节式机器人可用于自动装配、喷漆、搬运、焊接及后处理等工作,使用直线轴重新定位,可以做出灵活得像人类一样的动作。
六轴机器人这么灵活,那在composer要如何做它的运动动画呢?
六轴工业机器人一般有6个自由度,包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴);6个关节合成实现末端的6自由度动作,具有高灵活性、超大负载、高定位精度等众多优点。

平常使用SOLIDWORKS Composer更多的可能偏向于一些直线运动类型的动画,例如:
六轴机器人可以和人类一样灵活,那使用这种直来直去的操作方式可能不太适合了,那来跟着小编看一下,要如何通过Composer完成六轴机器人的操作动画:
(本期内容会以该模型进行演示操作)

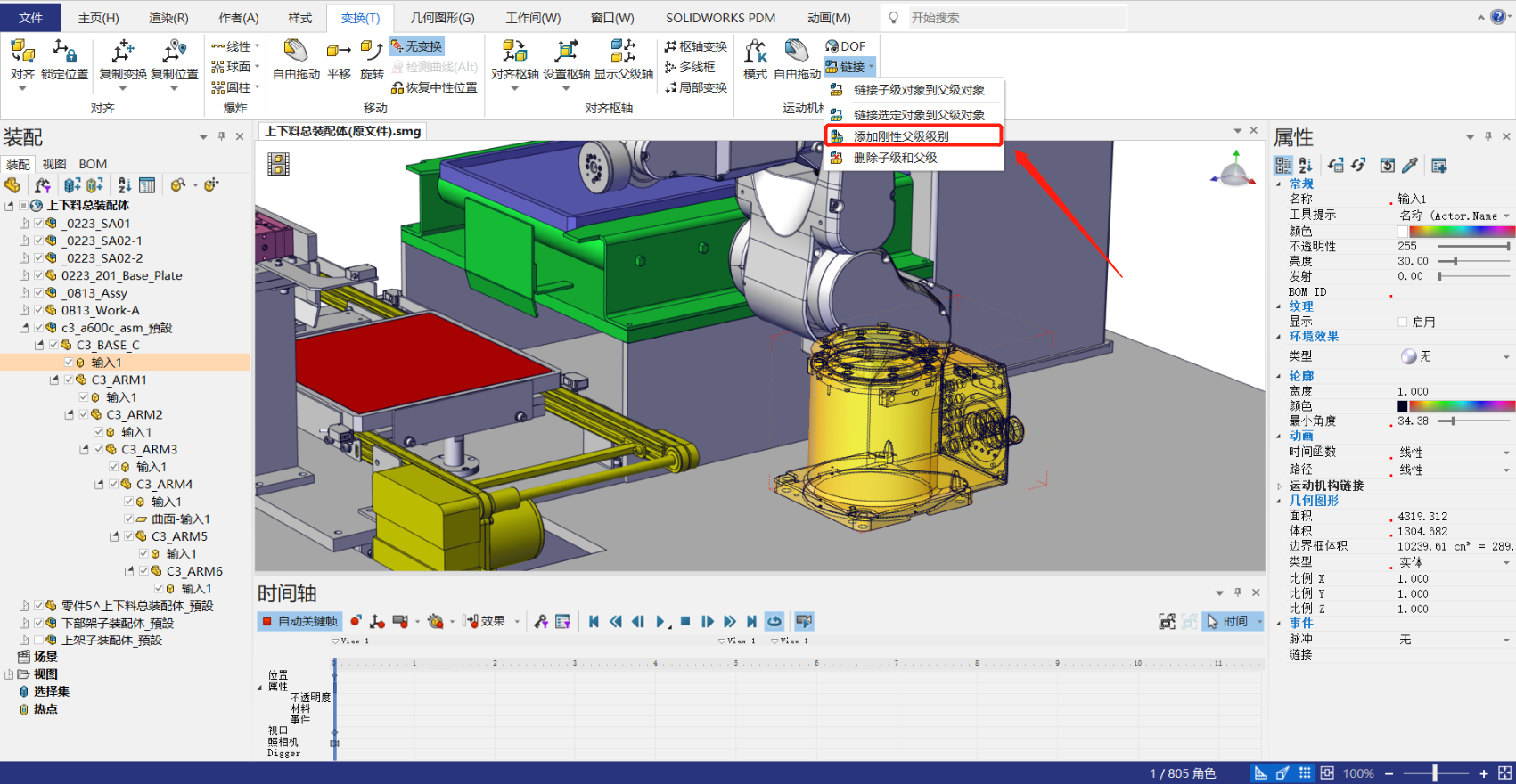
步骤1:选择1轴,将1轴设置为——父级级别
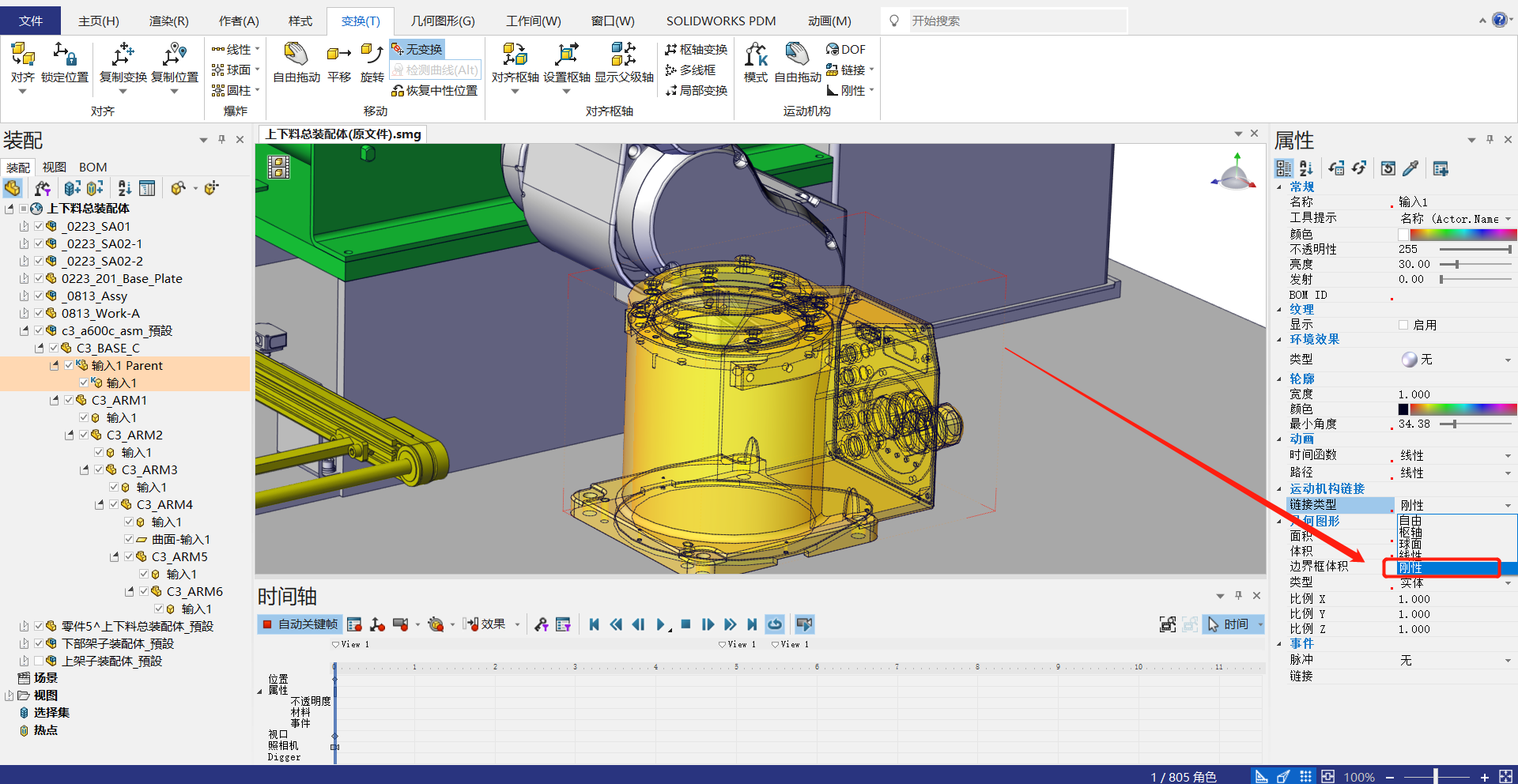
步骤2:再将其属性卡内的链接类型改为刚性(即为固定的意思)
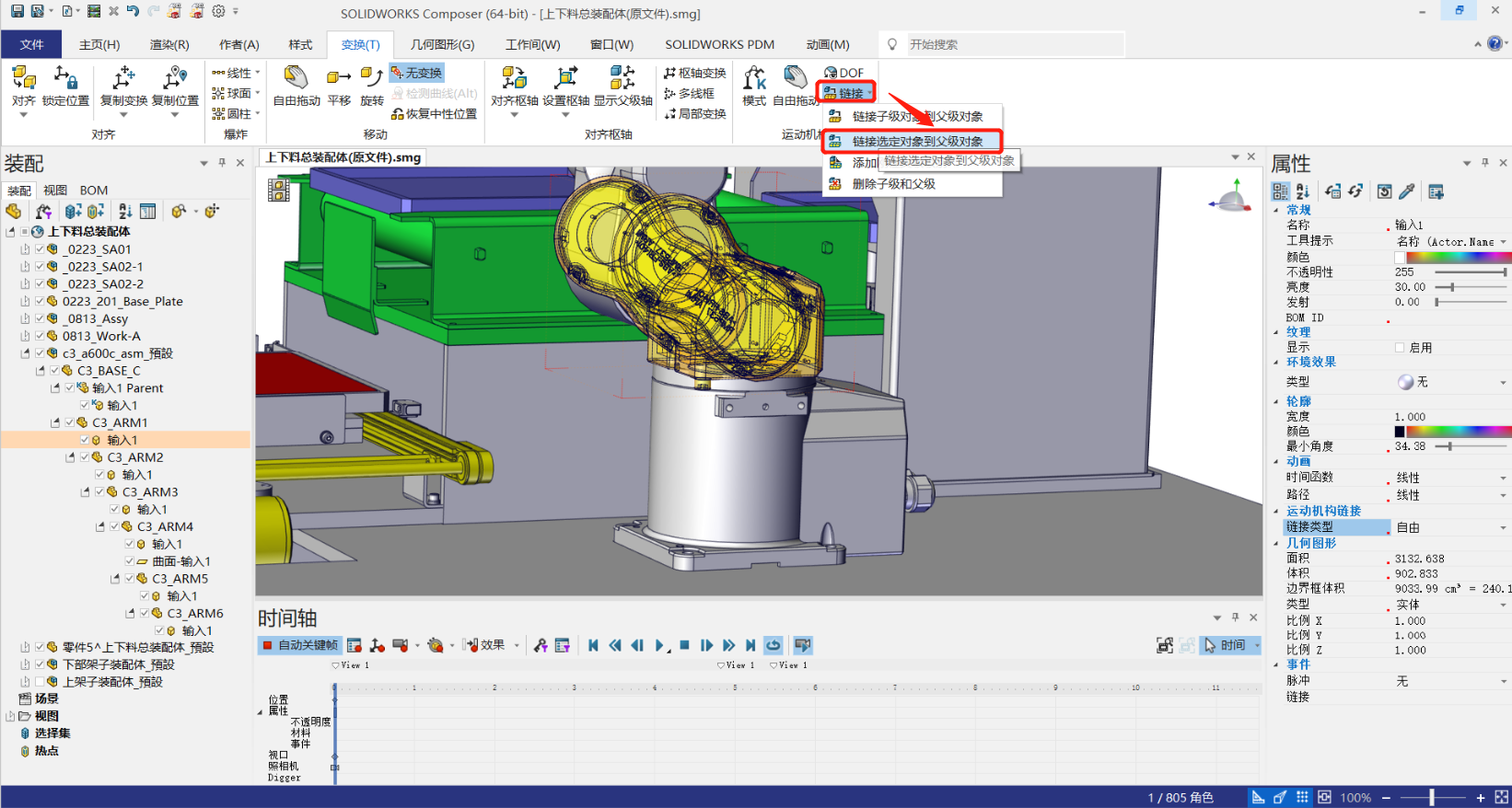
步骤3:选择2轴,并将2轴链接至1轴(此步骤类似于配合)
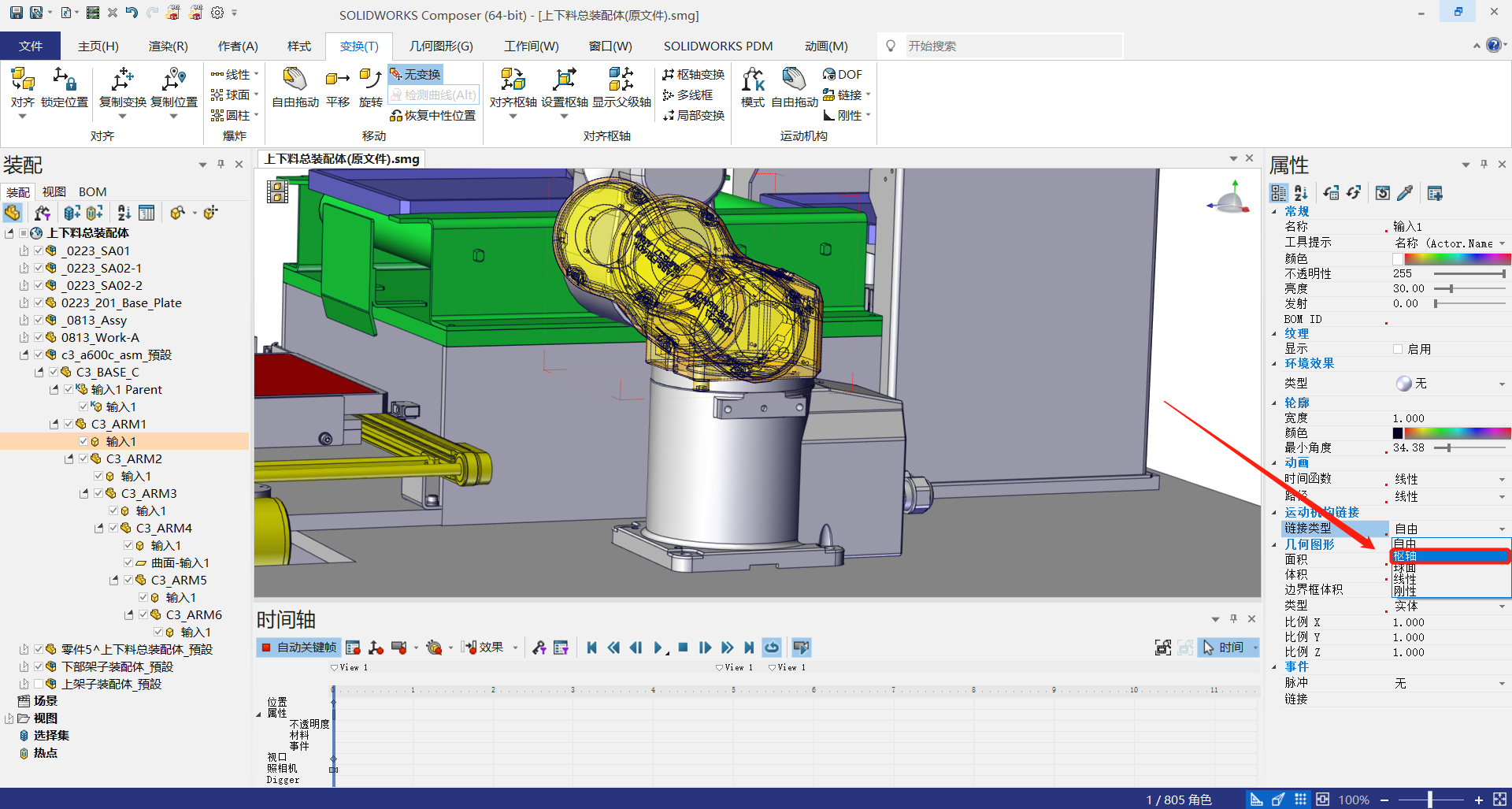
步骤4:将2轴的链接类型改为枢轴
步骤5:开启DOF(显示/隐藏自由度),并通过设置枢轴和链接轴来改变旋转轴
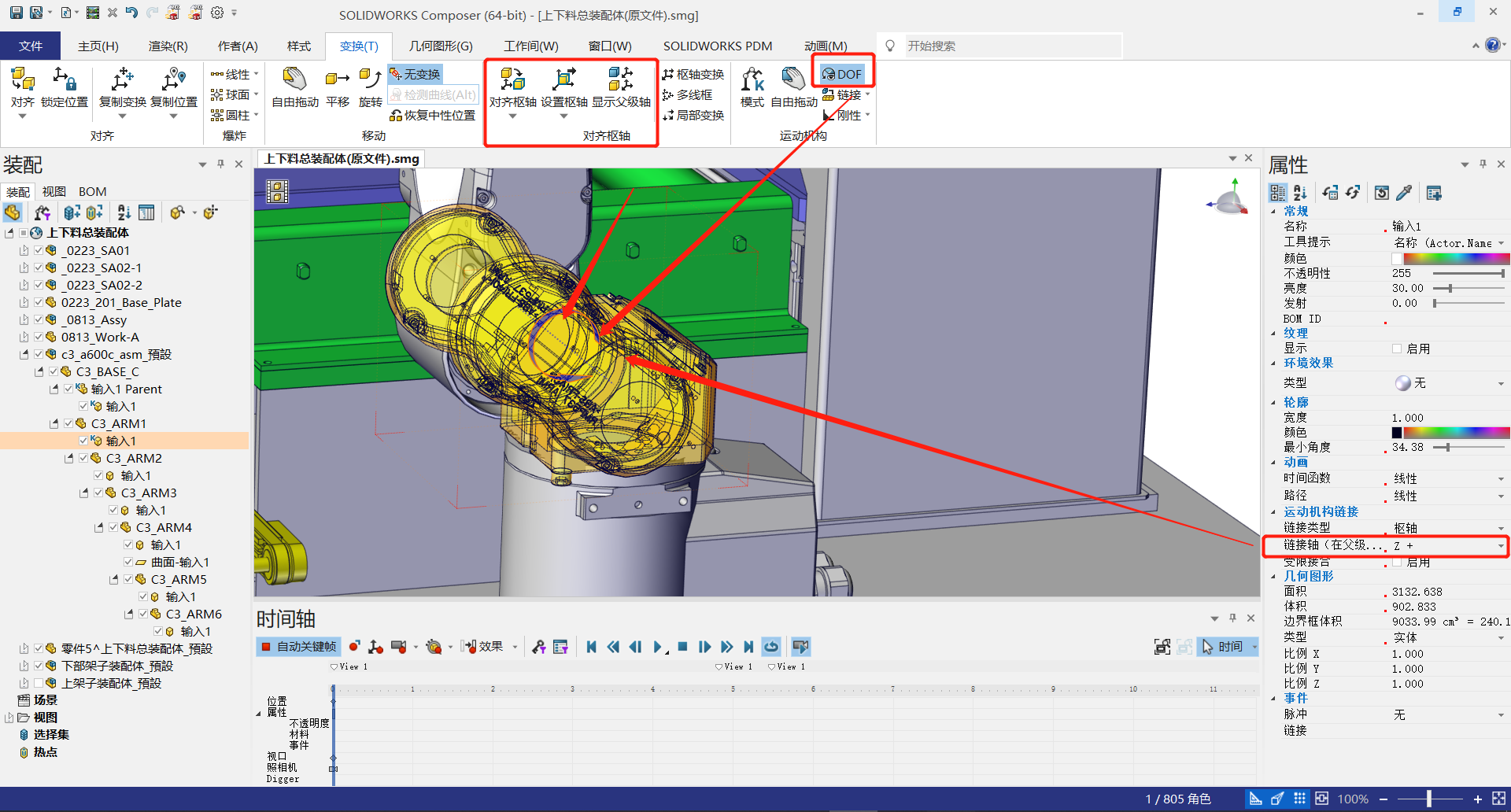
修改前
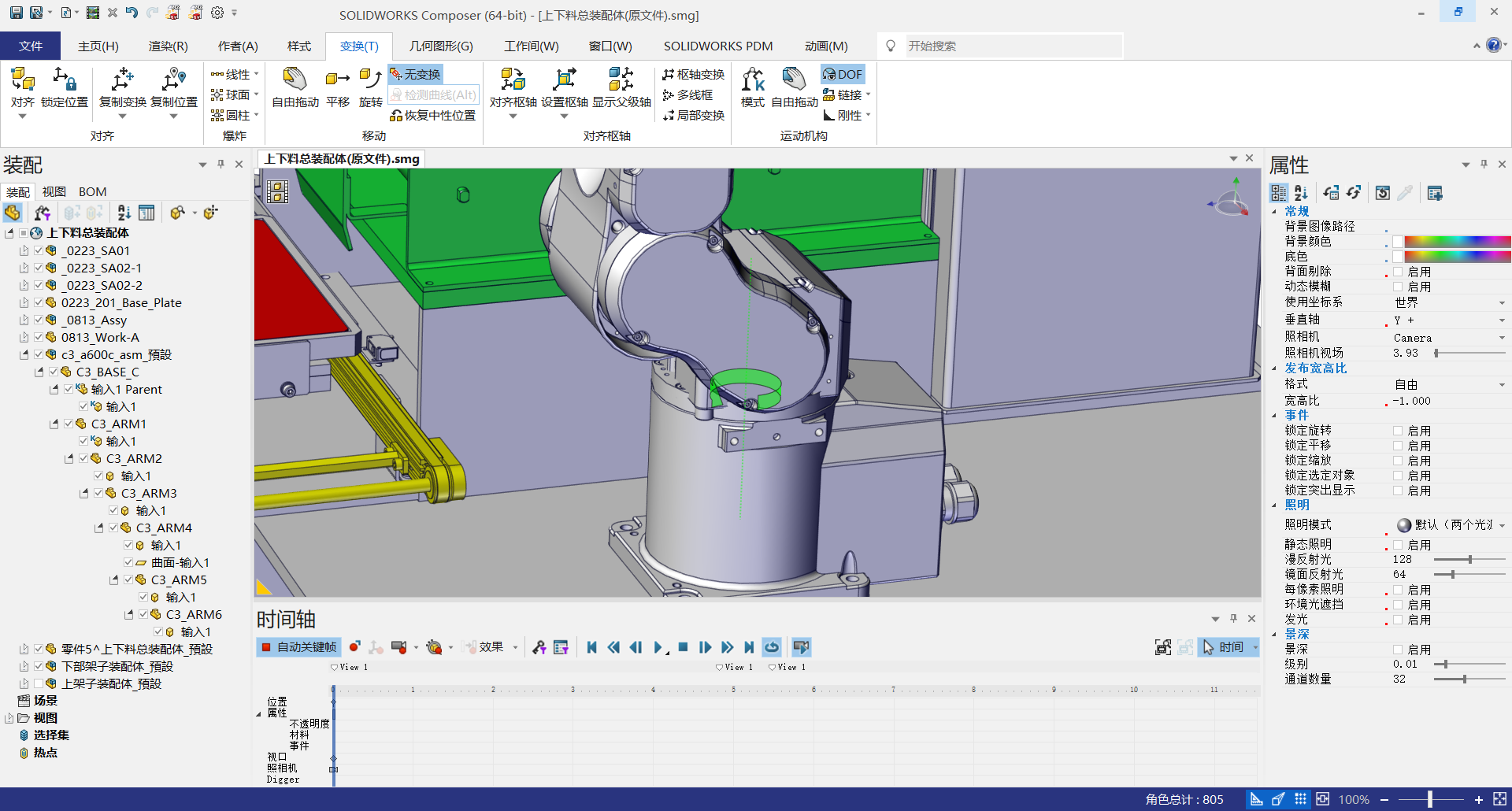
修改后
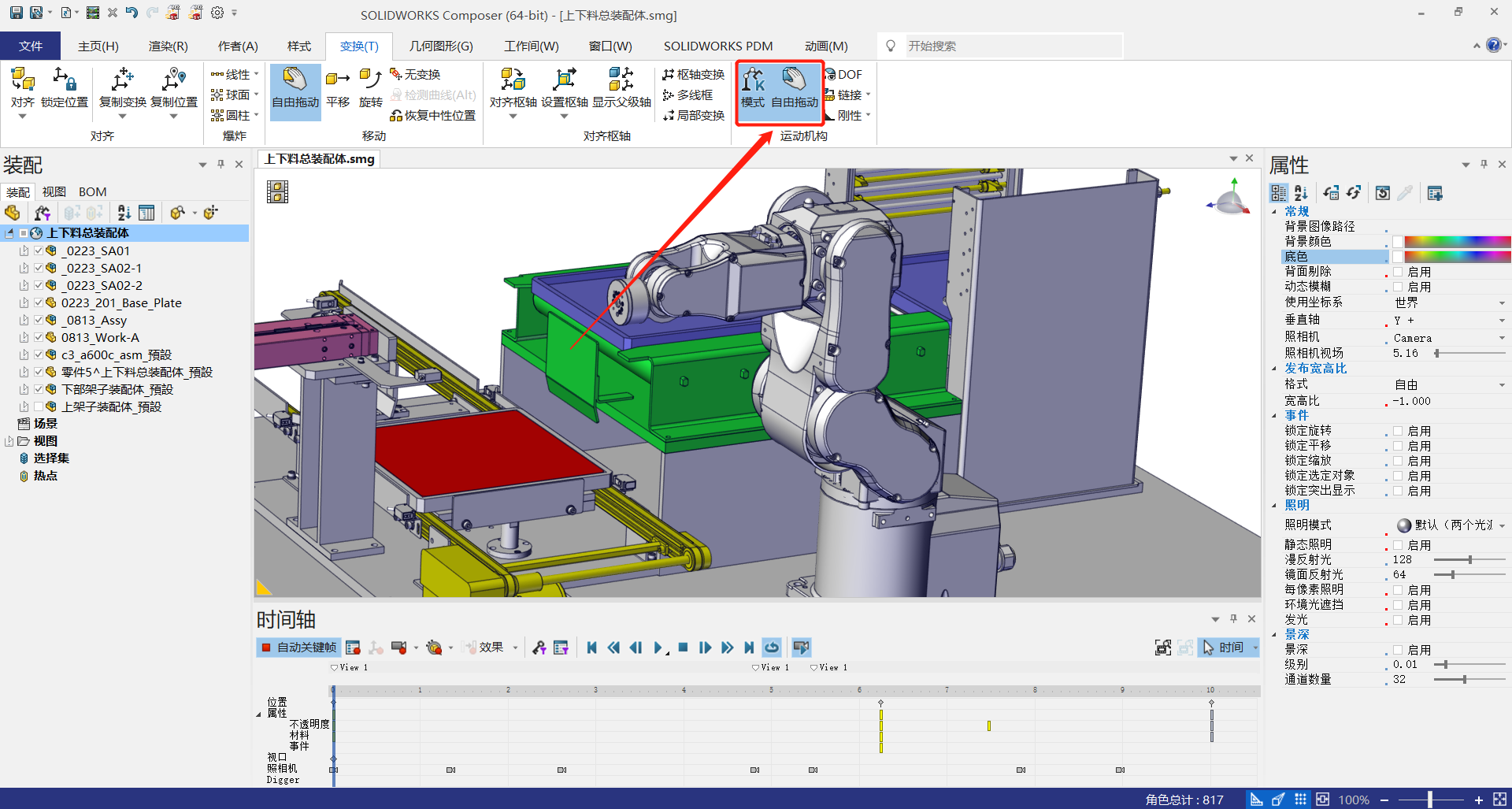
重复该步骤:(完成图)

完成后,开启运动机构——模式和自由运动就可以拖动六轴机器人即可进行联运运动。
最后和小编一起来看一下完成后的动画吧
- FEG智能车
- RoboMaster
赛事合作
友情链接:
森科云创科技(深圳)有限公司
Senke Innovations Technology Co., Ltd
电话:+86-755-8338 2595
手机:181 1872 7722(微信同号)
Email:info@senkei.com.cn
地址:深圳市龙岗区龙岗大道8288号大运软件小镇27栋203-204
Copyright © 森科云创科技有限公司版权所有 粤ICP备2023064430号

